
Tracteur tondeuse autoportée radiocommandé | Conception de la partie électrique : régulateur 12V, batterie forte capacité et distribution d’alimentation
Il est temps de rentrer dans le concret… Plus le temps de reculer : la réalisation est actée et les premiers colis arrivent chaque jour en provenance de Chine. Le volet électrique a nécessité quelques adaptations préventives pour faire face à l’augmentation de courant nécessaire afin d’accueillir l’ensemble des cartes électroniques & évolutions pour ce projet de tracteur tondeuse radiocommandé/téléguidé. Après quelques investigations sur l’électricité embarquée de ce tracteur tondeuse, plusieurs problématiques se sont rapidement présentées.
La batterie de 20 Ah d’origine se révèle trop petite et, sur de longues tontes d’environ 3h, risque d’être sur-sollicitée. En effet, il n’y a pas d’alternateur sur ce type de tracteur tondeuse, qui se contente d’un système de charge par le stator, délivrant un courant de charge assez faible. Toutefois, pas d’upgrade à ce niveau : je conserve le système d’origine et mise plutôt sur une batterie de capacité supérieure.
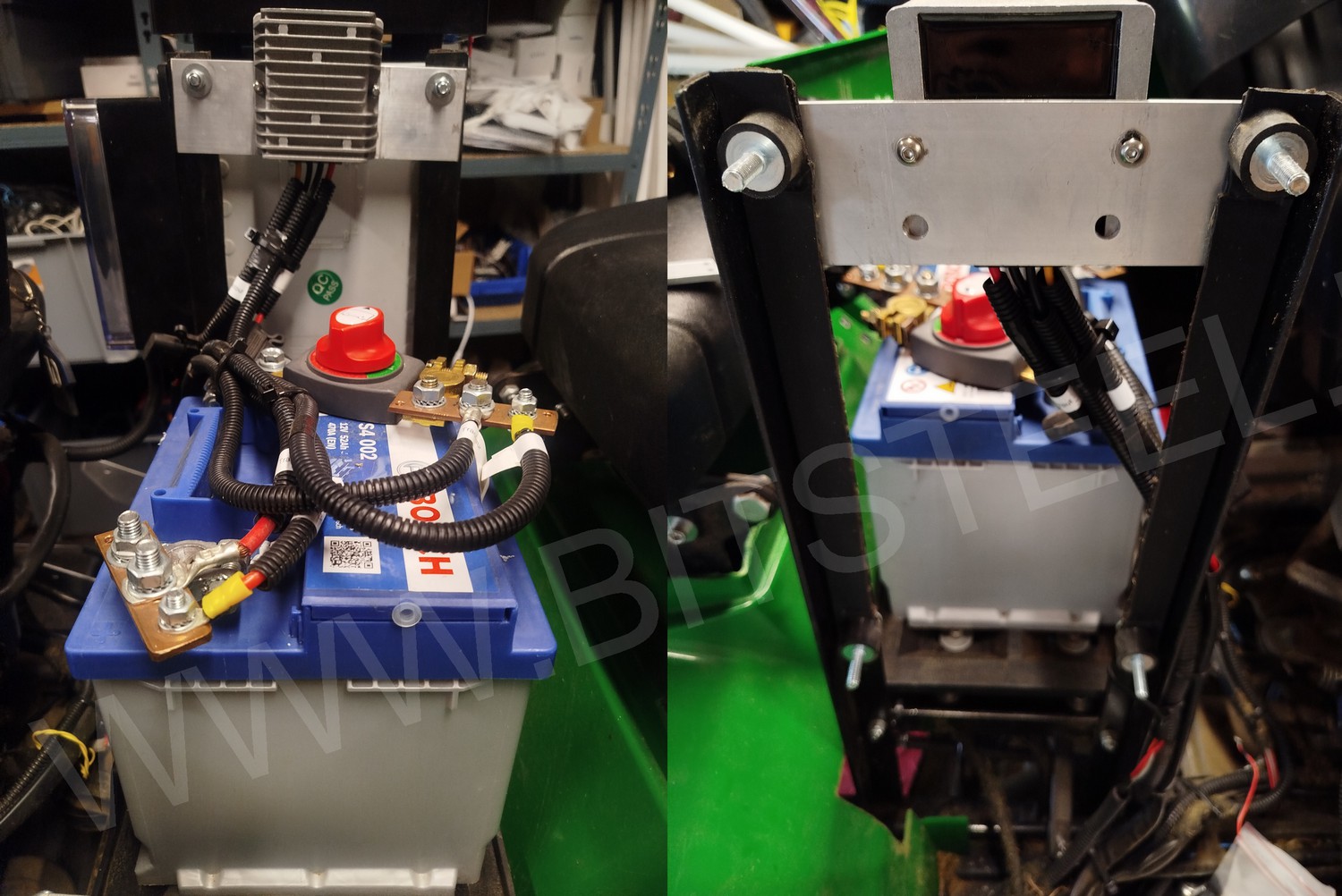
Je suis donc passé sur une batterie de 44 Ah, ce qui a nécessité la pose d’un support spécifique soudé au châssis avec un bac en plastique. Cette structure accueillera également le coffret embarquant toute l’électronique avec un montage souple par silent bloc. L’ensemble des fixations, raidisseurs et autres éléments sont pliés à l’aide d’une petite cintreuse modifiée puis soudé à l’arc (tout en douceur, nous parlons de (feuilles) tôles de trèèèès mauvaise qualité !).
Projet tracteur tondeuse autoportée radiocommandé (partie électrique) | Programme dans les grandes lignes :
- Migration vers une batterie de capacité supérieure avec support sur-mesure.
- Régulation de la tension par un régulateur 12V/20A associé à un condensateur 4700 µF.
- Distribution des alimentations en 12 et 5 volts pour les équipements.
- Câblage ajouté, passage sous gaines, boite à fusibles, barres cuivre, silents bloc & montage soigné !
Nb : Les câbles d’origine d’alimentation en 10 mm² (positif et négatif) ont simplement été déplacés vers la nouvelle batterie, avec une upgrade vers des cosses de plus gros diamètre avec jeu de barres en cuivres en raison des plots de contacts bien plus gros sur la nouvelle batterie.
Tracteur tondeuse autoportée radiocommandé | Fiabilisation de l’électricité de ce projet.
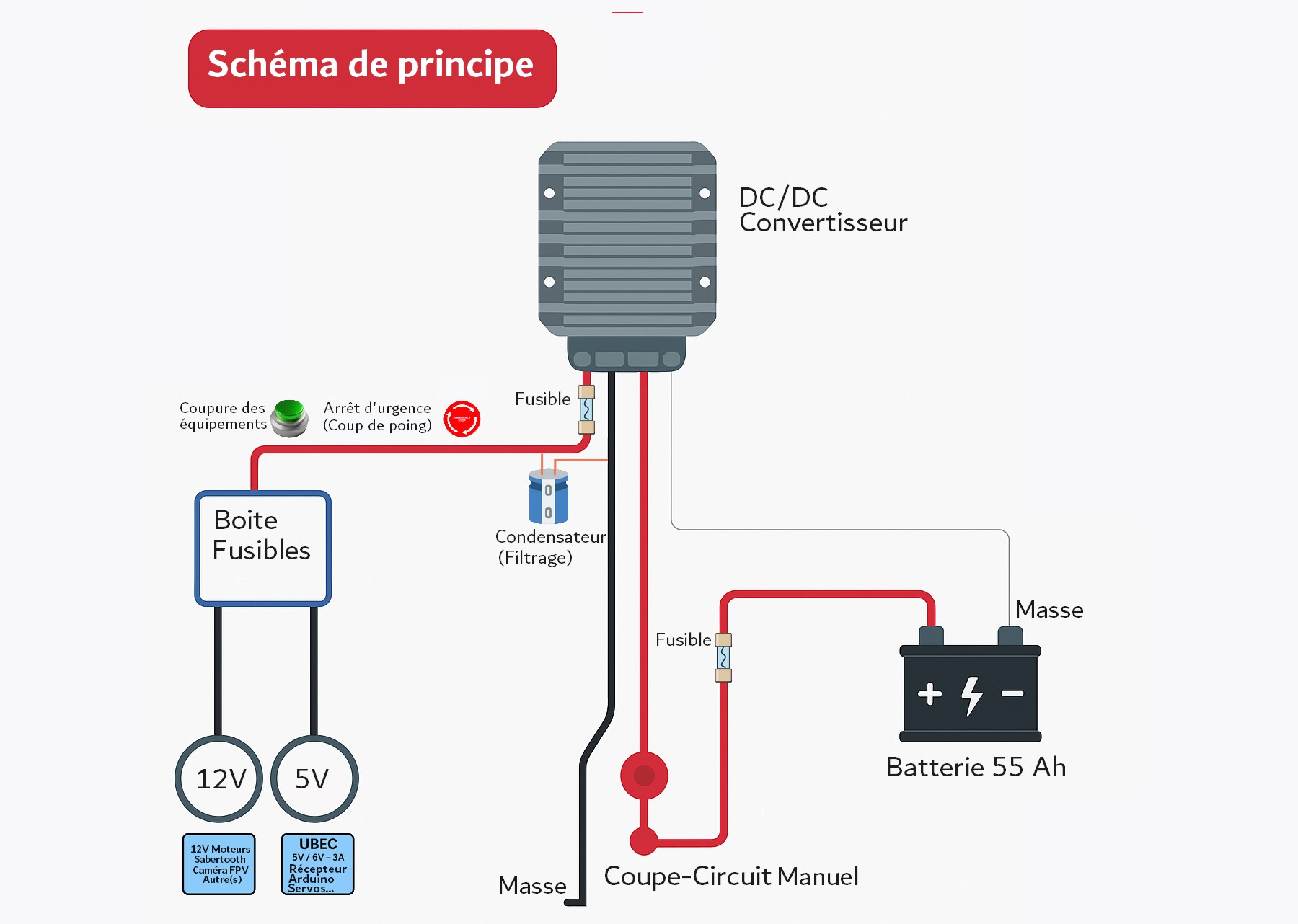
Le courant délivré par le régulateur de tension d’origine du moteur Briggs & Stratton est compris entre 10 et 16 A. J’ai toutefois préféré rajouter un régulateur de tension supplémentaire, entièrement dédié aux équipements électroniques. Celui-ci est étanche (IP67) et capable de délivrer un maximum de 20 A, se montrant largement suffisant pour alimenter les différents équipements (moteurs, Arduino, convertisseur 12V → 5V, récepteur radio, relais…).
Ce régulateur apporte une tension stable (pris en sortie de batterie) mais ne filtre pas les parasites ni les pics. J’ai donc ajouté, pour un filtrage certes rudimentaire, un condensateur de 4700 µF entre le + et le – en sortie du régulateur, juste avant la boîte à fusibles ainsi que plusieurs condensateurs céramiques sur les entrées des cartes (X2 Arduino, carte 433 Mhz de coupure d’urgence).
Nb : À ce sujet, j’ai choisi un condensateur de 35 V, largement suffisant dans notre cas car la tension de notre tracteur tondeuse radiocommandé ne dépassera jamais ce seuil critique, même si le régulateur principal de charge venait à flancher !
Tracteur tondeuse autoportée radiocommandé | Alimentation 12V/5V des équipements (Arduino, contrôleur, relais…).
Pour l’alimentation électrique des équipements, une nouvelle ligne en 6 mm² a été tirée de la batterie jusqu’au coffret afin de partir sur un tronçon dédié. Notons le coffret en montage souple avec des silent bloc compte tenu des vibrations de ce gros 18.5 CV ^^… Cette nouvelle ligne arrive sur une boîte à fusibles permettant de dispatcher correctement les circuits protégés vers les différents périphériques. Comme certains équipements nécessitent du 12V (carte moteur, moteurs, accessoires) et d’autres du 5V, il a fallu faire plaisir à tout le monde et utiliser un convertisseur Step-down DC-DC DFRobotSKU RB-DFR-222 afin d’abaisser la tension à 5V, destinée au récepteur RC, les 3 cartes relais, au servo de régime moteur ou encore aux Arduino Mega & Nano.
Notons pour la petite aparté, au démarrage de ce projet en août 2025, j’avais mis des buck converters génériques “AliExpress” qui manquaient de stabilité et coupaient sans raison, malgré un ampérage pourtant généreux au vu de mon utilisation. Je suis ensuite passé sur du DFRobot avec à la clé, une bien meilleure fiabilité. Ce montage permet d’apporter des alimentations séparées (12V et 5V) particulièrement stables, car le 12V en sortie de batterie d’origine n’est pas très propre. J’aurais pu tout alimenter depuis la carte Sabertooth (contrôleur moteur), qui délivre également une tension régulée de 5V/1A, mais j’ai préféré scinder les alimentations afin de préserver la carte et de pouvoir fonctionner en mode dégradé en cas de défaillance.
Tracteur tondeuse autoportée radiocommandé | Arrêt d’urgence & coupure matériel
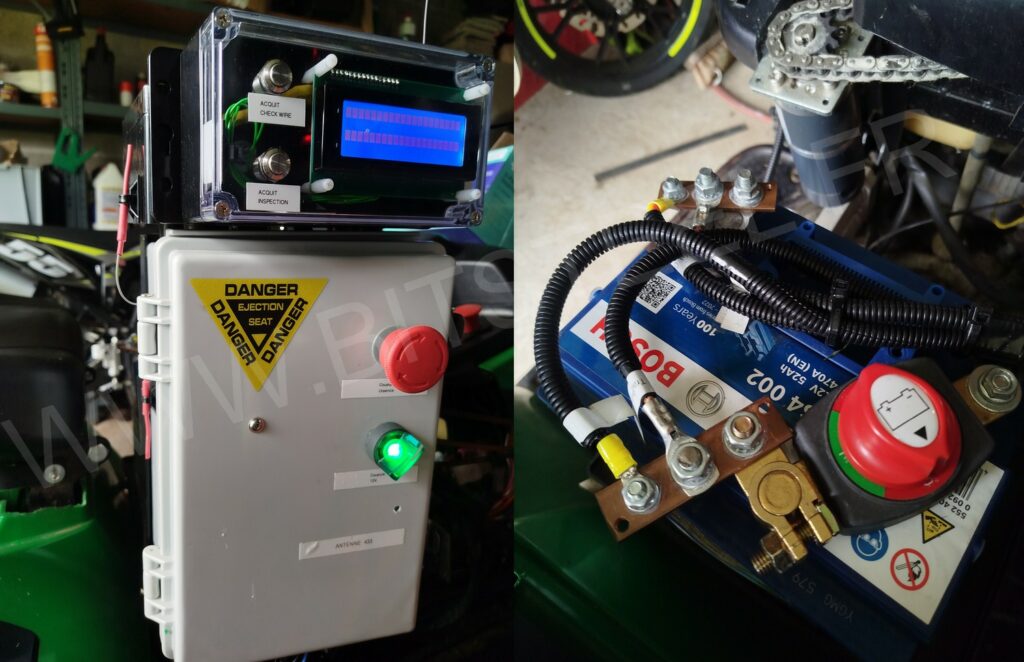
La partie commande de la gestion de l’alimentation de notre tracteur tondeuse radiocommandé est assez simple et se compose d’un coupe-circuit permettant de couper entièrement la batterie lors des arrêts hivernaux, d’un arrêt d’urgence type « coup de poing – le champignon rouge ! », et enfin d’un commutateur rotatif avec voyant permettant de couper le 12V en sortie de régulateur — idéal pour éviter de décharger la batterie lors des arrêts. Notons le coffret de vidéosurveillance qui possède aussi son interrupteur.
Nb : Au départ, il était prévu un asservissement de l’alimentation 12V directement par le contact à clé du tracteur, qui aurait commandé un relais 12v/30A gérant le 12V de tous les équipements. Toutefois, j’ai préféré opter pour un interrupteur avec retour visuel, plus simple et plus pratique.


Tracteur tondeuse autoportée radiocommandé | conclusion
Dans ce projet de tracteur tondeuse autoporté radiocommandé, le volet électrique reste assez sommaire, puisqu’il s’agit uniquement de rajouts et non de modifications du faisceau existant. Tous les passages de câbles (microswitchs, capteurs, alimentation moteurs) sont protégés sous gaines annelées et/ou gaine PVC et fixés sur le châssis de manière pérenne avec des liaisons au scotch tissé Tesa. Les moteurs sont câblés en 2,5 mm² et les sécurités en 0,5 mm², car aucune intensité importante n’y transite. La boîte à fusibles possède quelques réserves pour de futures extensions (retour vidéo FPV, guidage GPS RTK…).
Enfin, un soin particulier a été apporté à la gestion des masses dans le coffret électronique : un boulon avec rondelle éventail est dédié à raccorder toutes les masses (capteurs, Arduino, autres équipements), ce qui permet d’éviter les problèmes de boucles de masse et favorise une centralisation des négatif communs favorisant la paie sociale des équipements !