
DIY : Tracteur tondeuse autoportée radiocommandé : Genèse & début du projet

Pour ce projet DIY d’un tracteur radiocommandé, lancé à l’été 2025, l’idée a été de créer ce blog afin de documenter l’ensemble de la réalisation, en présentant chaque étape du projet, que ce soit sur la partie mécanique ou électronique. L’objectif est de rendre radiocommandée une tondeuse autoportée dans le but de simplifier les tâches fastidieuses et chronophages des tontes sur terrain accidenté. Il est prévu d’assurer une certaine fiabilité, un confort de commande, ainsi qu’un degré de précision suffisant pour conserver un véritable outil et non pas juste un défi technique, même si le facteur plaisir est une variable de taille ! Vous me direz : j’aurais pu passer sur un robot tondeuse autonome, mais au vu de la topologie accidenté du terrain, cela aurait été un choix peu stratégique sans parler des coûts relativement élevé d’achat.
Pour la présentation de ce tracteur tondeuse, il s’agit d’un très classique GGP 108 de 2010, avec une largeur de coupe de 108 cm, particulièrement efficace associé à un moteur Briggs & Stratton INTEK OHV développant 18,5 CV, idéal pour les terrains accidentés. Ce type de tracteur, qui partage une plateforme commune avec d’autres marques comme Club Cadet, Castelgarden, MTD ou Stiga est de conception chinoise et n’est pas toujours de très haute qualité. Exit toutes les pièces de guidage comme les roulements ou paliers, remplacés souvent par des entretoises en plastique…
La maintenance est fréquente : changements de paliers de lames, différentes biellettes à durée de vie courte, sans parler d’un châssis qui se déchire assez facilement en raison des tôles de piètre qualité aux épaisseurs n’excédant pas parfois le millimètre… Je ne me prononcerai par sur les courroies… Ce projet de Tracteur tondeuse autoporté radiocommandé va également s’appuyer sur une phase de fiabilisation que je détaillerai, s’appuyant sur plusieurs axes. Notons également que le coté radiocommandé vas évidement drastiquement diminué les contraintes avec près de 100 kg en moins, ce qui devrait fiabiliser l’ensemble. Avec un poids de 170 kg en ordre de marche, Colin Chapman valide les 37 % de masse en moins. Light is weigt !
DIY : Tracteur tondeuse autoportée radiocommandé : Découverte du cahier des charges de ce projet DIY

Pour ce projet de tracteur tondeuse autoportée radiocommandé, il aura fallu quelques semaines pour réfléchir aux différentes solutions techniques et réaliser quelques calculs qui, grâce à ChatGPT, se sont révélés particulièrement simples… même si GPT-5 a parfois manqué de fiabilité.
Pour les plus curieux, les principaux calculs concernaient :
- La valeur de couple nécessaire pour l’accélérateur et la direction.
- Le bon rapport de réduction de la direction optimisant la vitesse, la force et l’intensité max.
- La distance idéale pour les pignons de direction.
- Un amortisseur de couple pour la direction étant devenu fixe par l’usage d’un moteur réducteur.
- Le développement des différents programmes sous Arduino Nano.
Pour en revenir au projet, il a été décidé d’utiliser un système radio de marque FlySky 2,4 GHz à 10 canaux, entièrement programmable. Ce modèle vas donc me permettre en plus des fonctions marche avant, marche arrière et direction, de gérer : la coupure des lames en cas d’urgence, un démarrage outrepassant le contacteur, une coupure générale, la gestion du régime moteur par servo, ainsi qu’un éclairage LED particulièrement utile pour cette tondeuse autoportée ! D’autres fonctions viendront à terme, comme un retour vidéo et le réarmement manuel des fins de course depuis la télécommande.
Le plus important dans ce projet a résidé dans le choix des solutions techniques afin de ne pas partir sur des intensités que le contrôleur moteur (Sabertooth, nous y reviendrons) ne saurait gérer, tout en gardant une force d’action suffisante pour les actionneurs de ce tracteur tondeuse. Sur ce volet, de nombreuses améliorations ont été apportées pour rendre l’équation viable et rendre ce Tracteur tondeuse autoporté radiocommandé particulièrement fiable… Enfin je l’espère !
Spoil : à l’heure de l’écriture de ces lignes, le projet du tracteur-tondeuse radiocommandé est parfaitement fonctionnel lors de ses premiers essais juste avant l’automne !
Axel


DIY : Tracteur tondeuse autoportée radiocommandé : Découverte succincte des différentes sécurité implémentées sur ce projet.
Côté sécurité, le système repose sur une détection de ralentissement des lames afin d’éviter de détruire prématurément la courroie. Pour ça, un classique capteur à effet Hall monté sur la poulie permet de gérer automatiquement la mise en service des lames selon la densité de l’herbe et la période de l’année. Notons aussi un mode « Fail Safe » permettant en cas de perte de liaison radio, de coupé immédiatement notre vénérable Tracteur tondeuse autoporté radiocommandé. De quoi éviter de retrouver ce GGP 108 dans le village voisin… Bien entendu, d’autres dispositifs de sécurité sont implantés, comme des butées de fin de course ou une coupure d’urgence à distance. Mais nous aurons largement le temps d’y revenir dans un chapitre dédié, précisément dans le volet Arduino.
Nb. Si possible et par respect pour ce projet, j’aimerais que ce projet de tracteur radiocommandé basé sur un GGP 108 soit plus associé à Knight Rider qu’à Herbie la coccinelle anthropomorphique… qui m’a traumatisé ^^.
Projet DIY : Tracteur tondeuse autoportée radiocommandé : Les volets direction & contrôle de la marche avant/arrière
La partie contrôle de l’accélérateur et de la direction de ce projet de tracteur tondeuse radiocommandé a été le volet le plus compliqué à mettre en œuvre, afin de ne pas se tromper de solution. Concernant l’accélérateur, le fait de disposer d’une boîte de vitesses hydrostatique simplifie énormément cette gestion puisqu’il n’y a pas de rapport à passer. Ainsi, ce tracteur tondeuse radiocommandé s’appuie sur un vérin linéaire relativement fiable et simple à déployer, avec des fins de course par micro-switchs NO couplées à l’Arduino pour, en cas d’urgence, couper l’alimentation du vérin dès qu’il atteint sa fin de course dans l’un des deux sens en coupant le signal PWM dans un sens. Notons la télécommande FlySky, grâce à ses fameux End-point Adjustments (EPA) qui permet un ajustement de la vitesse ce qui se montre très pratique.
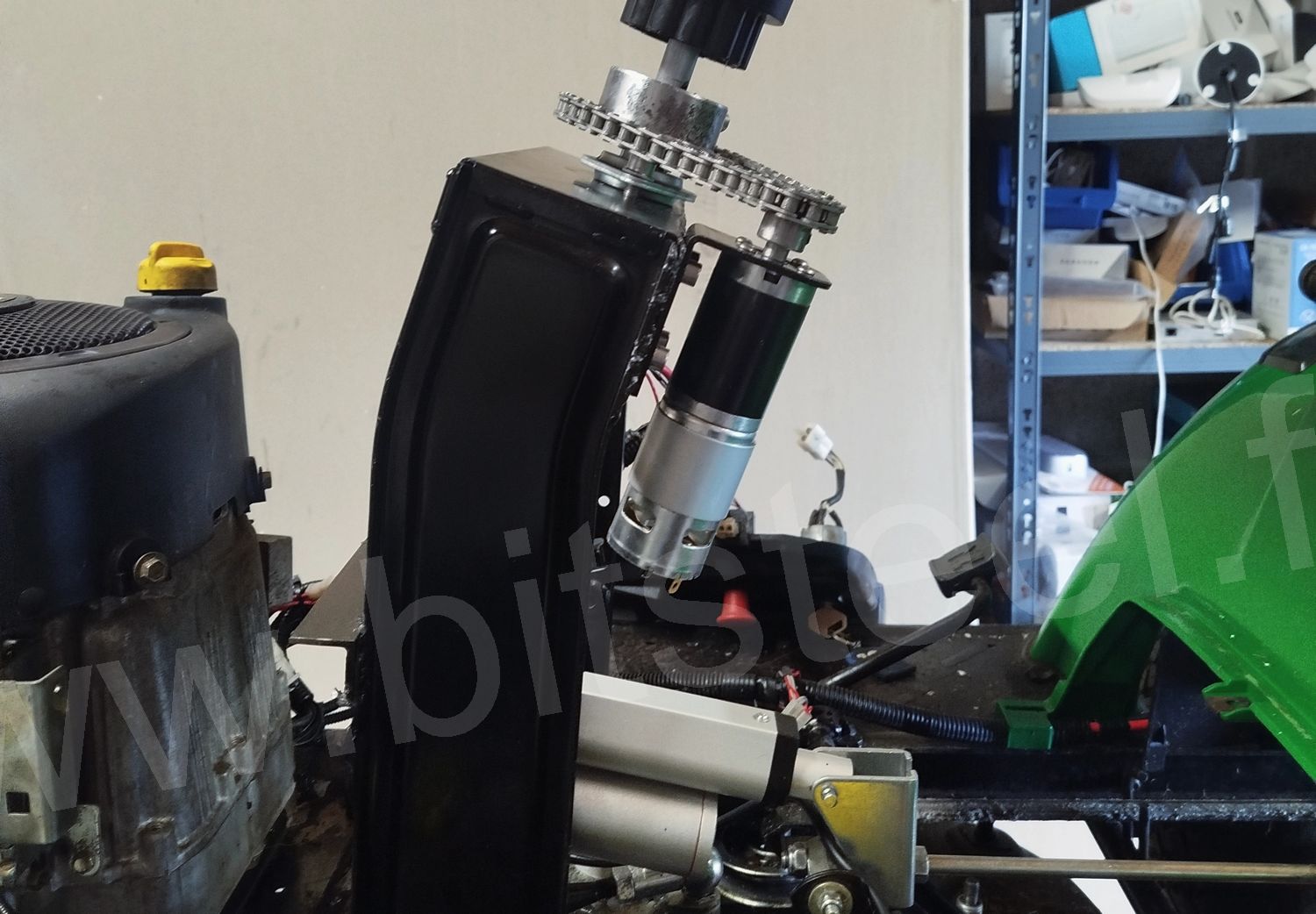
La partie direction repose sur un système de réduction par couronne et pignon, qui permet de choisir un moteur raisonnablement puissant tout en fournissant un couple suffisant pour déplacer l’ensemble. L’objectif était d’atteindre 30 Newton-mètres de couple, soit à peu près la force mesurée à la clé dynamométrique pour effectuer un tour complet du volant, de butée à butée, sans utilisateur assis et sans les contraintes du terrain. Nous y reviendront bien sur en détail dans un autre chapitre.
À noter que le volet direction de cette tondeuse autoportée radiocommandée sera drastiquement amélioré grâce notamment à différentes upgrades :
- L’usage de rotules « Unibal » pour l’actionnement des fusées de direction.
- La pose de roulements à rouleaux sous les fusées de direction.
- L’installation d’un palier à roulement pour gérer l’axe de direction.
- La pose d’un amortisseur de couple pour soulager la direction sur le terrain.
Pour ceux qui se poseraient la question, la gestion du freinage ne sera pas traitée : le terrain étant extrêmement plat, il suffit de lâcher l’accélérateur pour obtenir un arrêt total instantanément (très bon frein moteur). Le frein à pied sert surtout dans les terrains fortement pentus, ce qui n’est pas notre cas. Les fonctions d’arrêt d’urgence, par contre, sont maintenues et même fortement améliorées. De ce fait, toute la partie freinage a été retirée, permettant un gain de place et de poids (environ 4 kg).
DIY : Tracteur tondeuse autoportée radiocommandé : Conclusion de cette présentation.

Enfin, il est prévu (probablement – non défini à l’écriture de cette page en août 2025) un retour visuel par caméra FPV de type drone, permettant un retour vidéo efficace. À l’origine, l’idée était d’utiliser une caméra réseau avec de la Wi-Fi diffusant un flux 1080p encodé en H.265, offrant une bonne qualité d’image. Cependant, cette solution nécessitait un Switch PoE et générait une latence trop élevée, ce qui n’était pas acceptable. De plus, la faible stabilisation d’image des caméras de surveillance limite fortement leur usage dans ce type de projet.
Un guidage par GPS utilisant le protocole RTK est également à l’étude. Le RTK (Real Time Kinematic) permet de corriger le signal GPS pour atteindre une précision centimétrique. Avec l’aide d’une station de référence et d’un récepteur embarqué, le tracteur-tondeuse pourrait suivre des trajectoires précises. Le projet pourrait probablement s’appuyer sur AgOpenGPS, une solution open-source de guidage agricole.
Pour conclure, notons que la partie budget a également été optimisée afin d’éviter des dépenses excessives. Une enveloppe comprise entre 400 et 700 € a été fixée, ce qui me semble largement suffisant puisque l’ensemble des travaux sera réalisé par mes soins : électronique, soudure, mécanique générale. La plupart des composants proviennent d’Aliexpress, avec une sélection minutieuse pour « tenter » d’éviter les mauvaises surprises.
Enfin, une variable essentielle à prendre en compte reste le temps : le projet doit être optimisé car je ne dispose que de quelques heures en semaine de manière tardive, et éventuellement un peu le week-end selon les contraintes. La réalisation devra donc rester simple mais redoutablement efficace afin de ne pas perdre trop de temps en développement et en tests. Une grande partie du travail aura donc été pensée en amont, entre mon cerveau… et le GPU de GPT-5, (tu manques trop GPT 4) qui aura parfois eu quelques hallucinations 😅.
Jules
Top